Jedan od najvažnijih zadataka automatskih procesa je postavljanje veličine na određenu vrijednosti i zadržavanje vrijednosti proizvoljno dugo.
U sistemima automatskog upravljanja, kao što je prikazano na slici 1:
- Senzori predstavljaju “oči” (recimo DH11 senzor)
- Aktuatori su “mišići”
- Komunikacioni kanali su “živci” (recimo Arduino)
- Regulatori su “mozak”
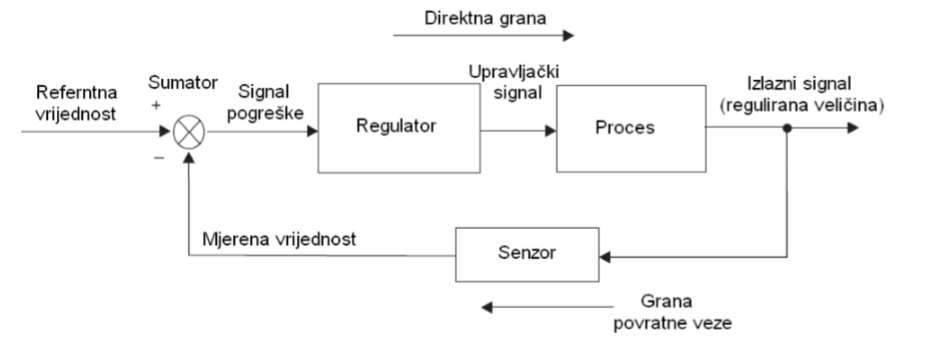
Slika 1 – Shematski prikaz sistema upravljanja
U ovom tutorijalu posvetit ćemo se regulatorima.
Do sada smo naučili da pomoću senzora DH11 očitamo trenutno stanje sistema, odnosno da očitamo temperaturu/vlažnost prostorije i to pomoću Arduina da ispišemo na ekran. Ta vrsta sistema nazivaju se pasivni sistemi.
Aktivni sistemi su sistemi koji, pored svih elemenata koji imaju pasivni sistemi, imaju i aktuator/motor. U pravilu, koliko imamo motora u sistemu toliko imamo i regulatora u sistemu.
Regulatorima upravljamo djelovanje motora. Pomoću regulatora kontrolišemo koliko snage motora će se koristiti, tako što šaljemo tačno određeni upravljački signal, kao što je prikazano na slici 1.
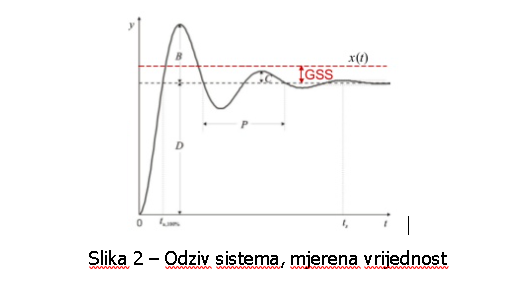
Posmatrajmo sada sliku 2.
Slika 2 predstavlja jedan standardni odziv sistema, odnosno vrijednosti koje očitavamo sa senzora, mjerene vrijednosti. Crvena linija predstavlja željenu vrijednost sistema, odnosno referentnu vrijednost, koju treba da dosegnemo. Crna linija predstavlja promjenu upravljane vrijednosti koju očitavamo sa senzora.
Radi lakšeg shvatanja objasnit ćemo na realnom primjeru:
Ukoliko želimo da je temperatura prostorije bude 28°C a trenutna temperatura sistema 20°C. Potrebno je zagrijati prostoriju, pomoću akturatora (grijača). Željena temperatura je 28°C, trenutna vrijednost je vrijednost koju očitavamo sa senzora i ona iznosi 20°C.
Potrebno je držati upaljen grijač sve dok je temperatura manja od 28°C, a kada temperatura prostora postane veća i jednaka 28°C potrebno je grijač isključiti. Ovaj dio, odnosno dvije IF petlje predstavljaju regulator.
Postoji više vrsta regulatora:
1) Dvopoložajni regulator
2) Tropoložajni regulator
3) PID regulator
4) Nelinearni regulator
Pojasnit ćemo ovaj put djelovanje dvopoložajnog regulatora.
Dvopoložajni regulator predstavlja najjednostavniju vrstu regulatora i prikazajemo ga sa dvije jednostavne IF petlje.
IF (temp > 28'C) grijač ON
IF (temp < 28'C) grijač OFF
Ukoliko su u pitanju velike snage motora koristimo opremu kao što je prikazano na slici 3. Ukoliko nemamo industrijski projekat,tada koristimo PC i npr. program MATLAB pomoću koga najjednostavnije isprogramiramo regulator.
Regulator u tom slučaju ne predstavlja nikakav novi uređaj već program na PC-u. To je ujedno i najčešći način.

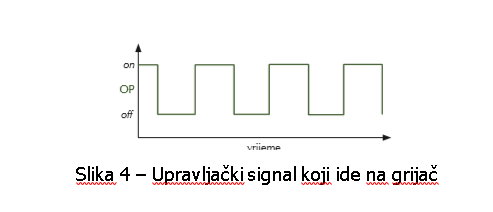
Slika 4 predstavlja paljenje/gašenje aktuatora (grijača) u određenom vremenskom periodu.
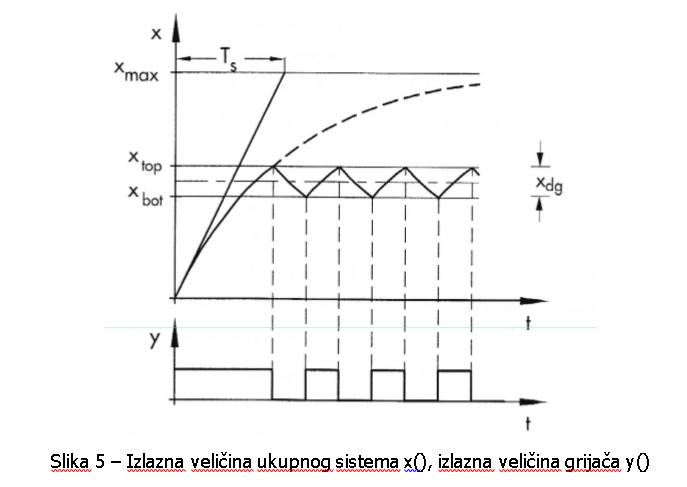
Na ovaj način stalnim paljenjem i gašenjem grijača temepratura sobe je približno konstantna, kao što je prikazano na slici 5. Na početku je potrebno da grijač bude duži vremenski period upaljen da dosegne željenu vrijednost. Kasnije su intervali paljenja i gašenja grijača prilično konstantni.
Za one koji žele znati više:
- Dvopoložajni regulator je najjednostavniji i najjeftiniji tip regulatora. S tim je i regulacija dosta nekvalitentna.
- Postoje granice preklapanja paljenja/gašenja grijača definisane od proizvođača grijača
- Prilikom korištenja dvopoložajnog regualtora dolazi do njihanja izlazne veličine u okolini željene veličine. Nikada nemamo jednakost, željena vrijednost = trenutna vrijednost. Zbog toga koristimo druge vrste regualtora.
- Preciznost dvopoložajnog regulatora ovisi od kvalitete senzora. Svakom senzoru je potrebno određeno vrijeme da reaguje na promjenu (u našem slučaju temperature), također je potrebno vrijeme da se dobijene informacija procesuira. Što je senzor kvalitetniji to nam je upravljanje bolje
- Kod dvopoložajnog regulatora stalno palimo i gasimo aktuator/grijač. Treba imati na umu da je najštetnije po aktuator da se on gasi (0% snage) i da se koristi na maksimalnoj snazi (100% snage). Za duži životni vijek aktuatora,a time i čitavog sistema, potrebno je da se balansira između 10-80% snage aktuatora. Taj metod ćemo pokazati u narednim tutorijalima
Autor: Alisa Jusupović